In modern aquaculture using gravity net cages, holes in the net and other type of net failures constitute a challenge with respect to fish escapes. Based on the Norwegian reports of escape incidents for salmon farming, more than two thirds of the registered escape incidents are related to holes in the net (Jensen et al. (2010)). One important measure established to reduce escapees is a mandatory net inspection after all operations involving manipulations of the net and weighting system.
For this purpose Remotely Operated Vehicles (ROV) has proven to be a safe, robust and cost efficient alternative to divers.
Net inspections are performed by operating the ROV in a traversing pattern inside the cage and close to the net with the aid of a camera, a depth sensor and a compass. Applying a camera as main instrumentation for navigation is especially demanding in turbid water and low light conditions. Also this kind of instrumentation makes the inspection quality very operator dependent.
The purpose of the work presented is to develop a navigation system that reports the ROV position and velocity relatively to a net cage reference frame. This is motivated by the need to guarantee a complete coverage of net area during an inspection.
Such a system will allow a significant higher level of traceability and documentation for the integrity of aquaculture nets. In a longer perspective such a navigation system might also report position and velocity as feedback signal to an automated motion control system allowing the ROV to navigate autonomously along the desired inspection path.
An aquaculture ROV operates in a demanding seawater environment with current, waves and flexible structures changing geometry in undetermined pattern. Drag forces introduced from current will alter the shape of the net-cage (Lader et al (2007)). This deformation is difficult to predict due to the varying current conditions and the changing drag coefficients e.g. depending on the degree of bio-fouling. This leads to challenges for the navigation system, as it has to report the position relatively to a non-fixed reference frame. As the shape of the cage is time variant, defining a net-cage reference frame based on the actual shape and position of the net and calculating the position relatively to this frame is a challenging task.
Materials and methods
Experiments have been conducted in laboratory facilities and sheltered harbor sites to determine the suitability of certain instrumentation to contribute to a ROV navigation system. Based on the preliminary results, experiments at an industrial scale production facility for salmon (157m circumference) are planned. This experimental setup will contain a ROV carrying stereo camera for vision-based net structure tracking, laser-based vision net proximity tracking and two different
types of hydro acoustic transponder networks. The trials will provide important knowledge of the required specifications for instrumentation on the reference frame to be used further.
Independent from the chiose of reference frame, all systems are depended on the ROV proximity and attitude relative to net. Within the work presented, different classes of instrumentation and approaches are investigated to fulfill this purpose.
As reference frames two solutions are under investigation:
• Net-cage relative reference frame:
• The ROV position is obtained directly to the relative non-fixed net-cage
• Cage single point relative reference frame:
• The ROV position is measured relative to a single reference point located at the cage, and combined with the proximity and attitude values net-cage relative position is obtained.
The applicability of the reference frame depends strongly on suitable types of instrumentation. With respect to accessible data and its use for the navigation system this work considers the following techniques as possible supportive for one or both of the reference frames:
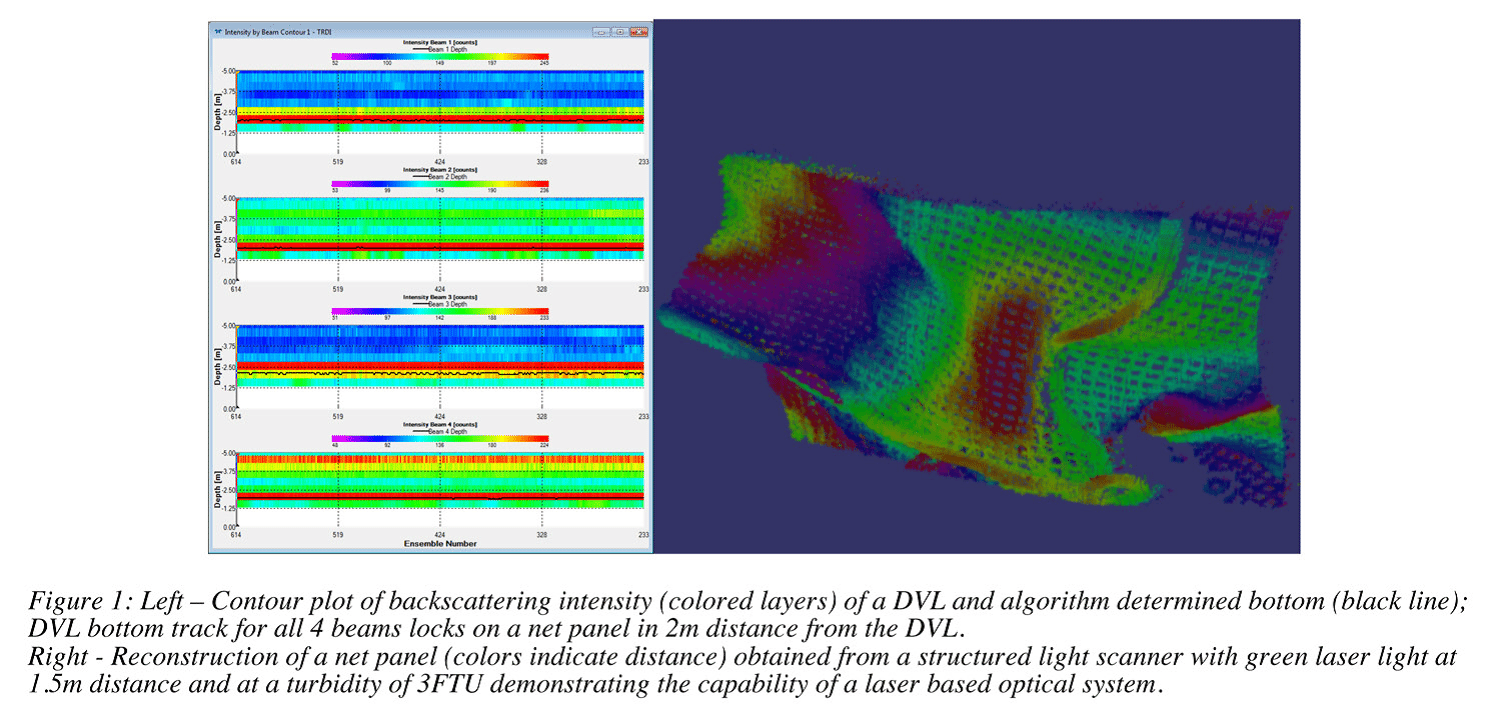
• Laser based vision net proximity and attitude (Karras and Kyriakopoulos (2007))
• Vision based net structure tracking and dead reckoning (Hildebrandt and Kirchner (2010))
• Doppler Velocity Log (DVL) used for net proximity and attitude (Vaganey et al. (2005))
• DVL based net structure tracking and dead reckoning (Vaganey et al. (2005))
• Hydro acoustic transponder network (Berntsen (2007))
Even though individual methods are already established as a proven and well working for underwater vehicles in the given case, special conditions are given for a net-cage containing a dense biomass of fish. Such as using hydro acoustic instrumentation is a challenge due to scattering from the air filled swim bladders. Also the huge variety of bio fouling and changing optical conditions limits the application of vision based techniques. The experiments conducted and planned, will allow to evaluate the net-cage specific operational boundaries for these sensors systems.
Results
The conference contribution will give an overview of conceptual studies for a net-cage navigation systems and results from the practical experiments. The focus will be on results from the experiments testing the instrumentation to determine proximity, altitude, velocity and position of the vehicle relatively to the net. Data samples (Figure 1) will be discussed and the individual strength and weaknesses of the methods applied within the specific aquaculture conditions will be demonstrated.
November 2013



